Important user information
This manual explains how to install, operate and configure a ESENET. This device may only be used for the applications described in this document.
This manual is to be used with a ESENET with firmware version 2.1.
These instructions are intended for use by trained specialists in electrical installation and control and automation engineering, who are familiar with the applicable national standards and safety procedures.
Safety Precautions
|
|
ELECTRICAL HAZARD
Failure to follow these instructions could result in death or serious injury! |
Document conventions
Throughout this manual we use the following symbols and typefaces to make you aware of safety or other important considerations:
|
|
Indicates a potentially hazardous situation that, if not avoided, could result in death or serious injury. |
|
|
Indicates a potentially hazardous situation that, if not avoided, could result in damage to equipment. |
|
|
Indicates information that is critical for successful application and understanding of the product. |
|
|
Provides other helpful user information that does not fall in above categories. |
|
|
Provides supplemental user information. |
|
Acronym
|
This typeface is used to introduce acronyms or product names. |
|
Command
|
This typeface is used to represent commands, prompts, input fields and filenames. In the context of programming it is used for functions, variable names, constants or class names. |
|
Placeholder
|
This typeface is used to represent replacable text. Replaceable text is a placeholder for data you have to provide, like filenames or command line arguments. |
|
User input
|
This typeface is used to represent data entered by the user or buttons. |
Screen output |
Screen output or program listing |
Introduction
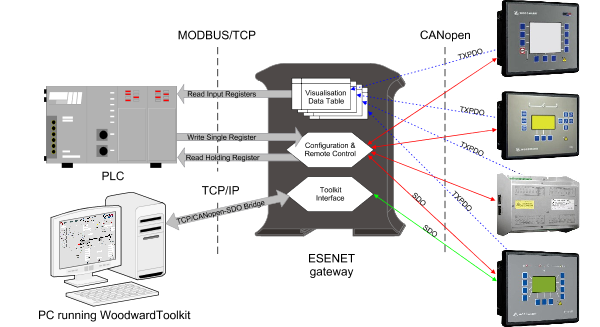
The ESENET is an Ethernet gateway specifically designed to interface Woodward’s Easygen series genset controls with Modbus/TCP networks and Toolkit. It interfaces via CAN bus with the Woodward controls.
The ESENET takes advantage of the multi-master capability and fast transmission speed of CAN to offer short Modbus/TCP poll cycles as well as concurrent access.
A single ESENET added to the CAN network will make all Visualisation Data of connected Woodward CANopen controls available without adding additional load to the CAN bus communication. In addition concurrent and fast read and write access to Parameter IDs is possible utilising parallel CANopen SDO transfers.
In addition to Modbus/TCP access the ESENET provides a Toolkit interface. Using this facility you can run local and remote Toolkit sessions from your PC via Ethernet and TCP/IP through the ESENET gateway to Woodward controls connected on ESENET's CAN interface.
Usage and configuration of the gateway is simple and conveniently performed using a web browser which connects to the embedded web server.

Common applications include:
-
PLC connection
-
Operator panel interfacing
-
HMIs
-
SCADA integration
-
Power station automation
-
Gen set control
-
Remote control & monitoring
-
Data logging
Features
The ESENET gateway provides the following key features:
-
Multiple concurrent Modbus/TCP connections
-
Toolkit interface to configure Woodward controls via Ethernet
-
Supports Easygen 3500, 3400, 3200, 3100, 2000 and 1000 models
-
Supports LS-5
-
Supports DTSC-200
-
Addresses up to 16 controls
-
Uses existing CAN wiring
-
Fast Modbus poll rates for Visualisation Data (< 7 ms)
-
Concurrent reads and writes of Parameter IDs
-
Register layout and address range compatible with serial Modbus data protocol 5003 for Easygen-3000 devices
-
Internal buffer for Visualisation Data
-
Supports alternative Modbus register range below address 50000
-
Transparent handling of data guarantees future compatibility
-
Low configuration overhead, just an IP address
-
Embedded web server for easy configuration and commissioning using a web browser
-
Firmware upgradeable via Ethernet
-
Status LEDs for power, Ethernet link, device status and communication status
-
DIN rail mountable
-
24 V DC (10-30 V) power supply
Quick start checklist
-
Read this set of instructions properly and in its entirety.
-
Mount the unit.
-
Connect the power. Do not connect yet CAN bus or serial ports.
-
Configure the Ethernet communications settings with a web browser (using an Ethernet crossover cable) or with a terminal program like HyperTerminal (using a null modem cable)
-
Configure the CAN bus settings.
-
Configure the serial line communication settings.
-
Configure the operational aspects of the device.
-
Wire CAN bus.
-
Wire serial line interfaces.
Description
The power and CAN terminals are placed on the top side of the unit. The RS-232 and Ethernet connectors are placed on the bottom side of the unit as shown in the following illustration:
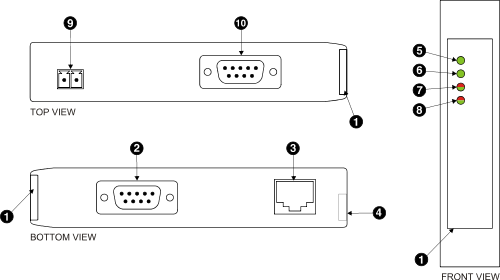
LED indicators
Four LEDs located at the front panel indicate the status of the ESENET. The LEDs assist maintenance personnel in quickly identifying wiring or communication errors.
A LED test is exercised at power-up, cycling each LED off, green and then red for approximately 0.25 seconds. At the same time the power-on self test of the device is performed.
The following table outlines the indicator condition and the corresponding status after the power-on self test has been completed:
| LED | Function | Condition | Indication |
|---|---|---|---|
Power |
Power |
Off |
No power applied to the device. |
Green |
Power supply OK |
||
Link |
Ethernet link |
Off |
No Ethernet link |
Green |
Ethernet link OK |
||
Status1 |
Device status |
Off |
The device has an unrecoverable fault; may need replacing. |
Flashing green at 1 s rate |
Device operational but needs commissioning due to configuration missing, incomplete or incorrect. |
||
Green |
The device is operating in normal condition. |
||
Flashing red at 1 s rate |
Device operational but has a fault listed which requires acknowledgment. |
||
Red |
The device has an unrecoverable fault; may need replacing. Flashing sequence and rate of Status2 LED indicates fault class. |
Principles of operation
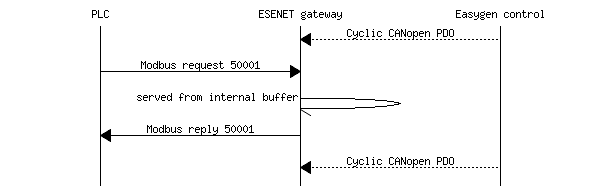
The ESENET acts as a CANopen consumer and monitors the CAN bus for transmission of well-known communciation objects. Once these communication objects identify one of the supported Woodward controls, the ESENET starts to buffer all multiplexed visualisation data of such device into its internal data tables.
The ESENET also acts as a Modbus server on the Ethernet interface. It accepts connections and Modbus queries from Modbus master devices. The Modbus registers are then served from the ESENET's internal data tables. Because of the data table buffering, the Modbus can be polled independant of CANopen TXPDO transfer cycles. The ESENET allows a maximum of 8 connections via Modbus/TCP.
Installation
Regulatory notes
|
|
|
This equipment has been tested and found to comply with the limits for a Class A digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference when the equipment is operated in a commercial environment. This equipment generates, uses, and can radiate radio frequency energy and, if not installed and used in accordance with the instruction manual, may cause harmful interference to radio communications. Operation of this equipment in a residential area is likely to cause harmful interference in which case the user will be required to correct the interference at his own expense.
This Class A digital apparatus complies with Canadian ICES-003.
Unpacking, handling and storage
|
|
|
Before connecting anything
|
|
|
DIN rail mounting and removal
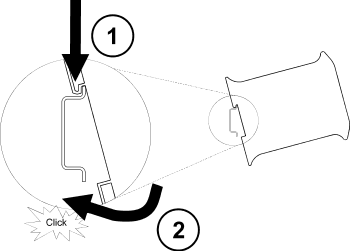
The ESENET gateway is designed to be mounted on a 35 mm DIN rail according to DIN/EN 50022. The enclosure features a 35 mm profile at the back which snaps into the DIN rail. No tools are required for mounting. Please observe the rules outlined in [Mounting].
|
To mount the unit on a DIN rail, slot the top part of the ESENET into the upper guide of the rail and lower the enclosure until the bottom of the red hook clicks into place. |
|
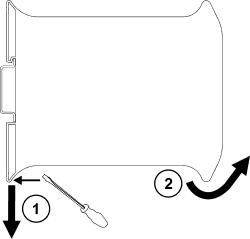
To remove the ESENET from the DIN rail, use a screw driver as a lever by inserting it in the small slot of the red hook and push the red hook downwards. Then remove the unit from the rail by raising the bottom front edge of the enclosure. |
Mounting rules
The enclosure provides protection against solid objects according to IP 20 / NEMA Type 1 protection rating. When mounting the unit observe the following rules:
|
|
|
Powering the ESENET
|
|
Before connecting power please follow the rules in [Safety] and [Connecting]. |
Power is supplied via a 3.81 mm 2-pin pluggable terminal block located at the top side of the mounted unit (refer to [DescriptionDiagram]). The following table and picture shows the power terminal socket pinout:

|
|
|
|
Make sure that the polarity of the supply voltage is correct before connecting any device to the serial and CAN ports! A wrong polarity can cause high currents on the ground plane between the V- power supply pin and the CAN port and serial port ground pins, which can cause damage to the device. |
Wiring the CAN interface
The CAN interface connects the ESENET to the Woodward CANopen based controls.
The CAN connector is a male 9-pin D-sub type located at the top side of the mounted unit (refer to [DescriptionDiagram]). It has industry standard CiA DS-102 pinout as shown in the following table and picture:
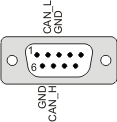
|
|
-
The network must be terminated at both ends with its characteristic impedance, typically a 120 Ohm 1/4 W resistor.
-
Maximum number of electrically connected CAN nodes is 64
[The number of logically adressable units may be less.]
. -
Maximum CAN cable length is 250 m (820 ft) and is derated depending on bit rates and cable type.
-
Stub connections off the main line should be avoided if possible or at least be kept as short as possible. Stub connections must not have terminating resistors.
-
To ensure a high degree of electromagnetic compatibility and surge protection the cable should be twisted pairs and shielded. An additional cable conductor or pair may be used for the CAN_GND reference.
|
|
Do not connect the cable shield to the CAN_GND pins or the connector shell! Use an external chassis ground connection to terminate the shield. |
Connecting Ethernet
The following table describes the 10BASE-T Ethernet RJ-45 connector pinout:

|
|
-
We recommend to use Category 5 UTP network cable.
-
Maximum cable length is 100 m (3000 ft).
Connecting to the diagnostic port
The device has a RS-232 interface which is used as a diagnostic port and only active after power-up of the device. It allows configuration of the IP settings and reset of the settings to factory defaults via a terminal program.
The Diagnostic port connector is a male 9-pin D-sub type located at the bottom side of the mounted unit (refer to [DescriptionDiagram]). It has industry standard EIA-574 data terminal equipment (DTE) pinout as shown in the following table and picture:
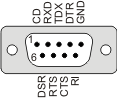
|
|
-
Maximum cable length is 15 m (50 ft) or a length equal to a line capacitance of 2500 pF, both at the maximum standard bit rate of 20 kbps. If operating at higher bit rates the maximum cable length drops to 3 m (10 ft) at a bit rate of 57.6 kbps.
-
To assure a high degree of electromagnetic compatibility and surge protection the RS-232 cable should shielded. The shield shall be connected to an external chassis ground at the either or both ends, depending on the application.
-
The shield must not be connected to the GND pin.
|
|
To connect the ESENET to a PC (Personal Computer) or any other device with data terminal equipment (DTE) pinout you need a null-modem or cross-over cable. |
Ethernet & IP configuration
Before configuring the ESENET, obtain a unique static IP address, subnet mask, and default gateway address from your network administrator.
The factory default IP address of the ESENET is 169.254.0.10 which is in the Automatic Private IP Addressing (APIPA) address range.
There are several methods of configuring the unit’s IP address:
-
Removing your PC from your corporate network and using a cross-over network cable (see [ConfigCrossOver]).
-
Via the diagnostic port and a terminal program like HyperTerminal (see [ConfigTerminal]).
-
Leaving your PC connected to your corporate network and temporarily changing the IP settings on your PC to match the subnet of the ESENET (see [ConfigChangeIP]).
|
|
In order to connect to the ESENET via TCP/IP, your PC must be on same IP subnet as the gateway. In most situations this means that the first three numbers of the IP address have to be identical. |
IP setup using a web browser and a cross-over network cable
This method applies only to operating systems like Windows, which support APIPA (Automatic Private IP Addressing). It also requires your PC to be configured for DHCP. If your computer is configured with a static IP address, follow the procedure in [ConfigChangeIP].
-
Disconnect your PC from your corporate network. If your computer is configured for DHCP it should now automatically fall back to use a default IP address from the APIPA range 169.254.x.x (Windows PCs only).
-
Connect an Ethernet crossover cable from the ESENET to the computer.
-
Start Internet Explorer.
-
In the address box, type 169.254.0.10 and then press Enter.
-
Click Configuration… and then Ethernet & IP in the menu on the left side of the page.
-
Enter the IP address, subnet mask, and gateway address assigned to your ESENET, then click Save.
-
Reconnect your computer to your corporate network.
IP setup using a terminal program like HyperTerminal
-
Connect a null modem RS-232 cable between your PC and the ESENET's diagnostic port.
-
In Windows XP, click Start, point to All Programs, point to Accessories, point to Communications, and then click HyperTerminal.
-
When HyperTerminal starts, it opens a dialog box and asks for a name for the new connection. Enter a name (for example, deviceconfig) then click OK.
-
The Connect to dialog opens. Select the COM port you will be using in the Connect using drop-down list box, then click OK.
-
Select 9600, 8, None, 1, None in the COM Properties dialog, then click OK.
-
HyperTerminal is now connected to the serial line.
-
Keep the space bar pressed in HyperTerminal and power-cycle your device at the same time.
-
A menu should appear after one or two seconds showing device information, the current IP configuration and a > prompt.
-
Type SETIP, then press Enter within 10 seconds after the prompt is shown:
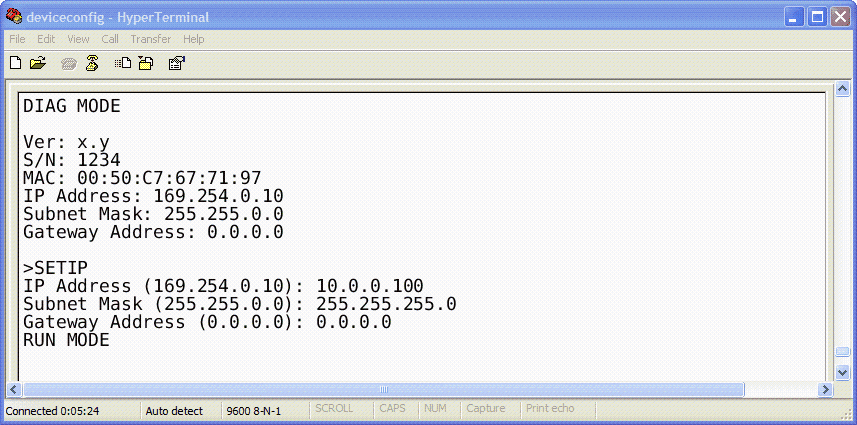
-
The device will show current values and prompt for new values for IP address, net mask and gateway address. Enter the new values and press Enter. A key press must be received at least every 10 seconds otherwise the device will go back to RUN MODE and resume normal operation.
-
The gateway will return to the main prompt. Type X and press Enter to leave DIAG MODE and resume normal operation indicated with RUN MODE.
Temporarily changing the IP settings on your PC
This method involves manually assigning an IP address to your PC in the same subnet as the gateway. The default subnet of the gateway is 169.254.0.0/16.
-
Connect the ESENET to your Ethernet network.
-
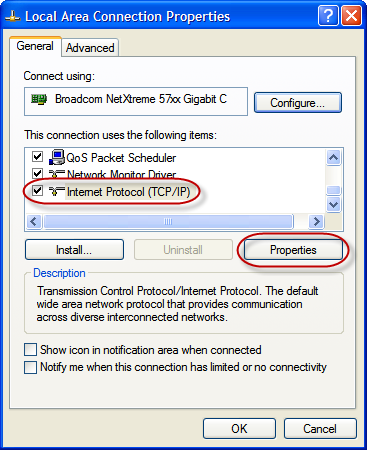
On a Windows PC, open the Control Panel and double-click on Network Connections. Right-click on the Network Connection associated with your network adapter and select Properties:
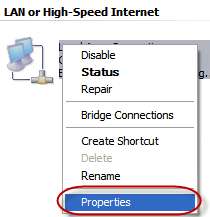
This will show the Local Area Connection Properties Dialog:
-
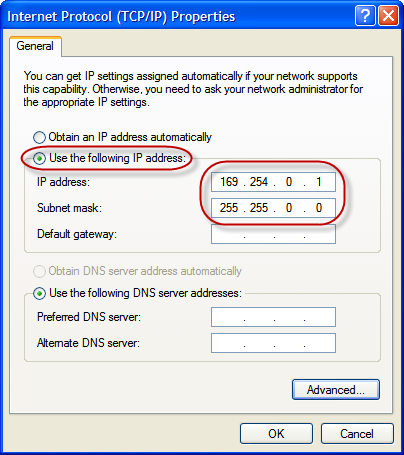
Select the Internet Protocol (TCP/IP) entry and click on Properties to open the TCP/IP Properties dialog as shown below:
-
Write down your current settings so they can be restored later.
-
Select Use the following IP address and configure a static IP address in the same subnet as the device, for example 169.254.0.1 and the subnet mask 255.255.0.0. Click OK to save the changes.
-
Start Internet Explorer.
-
In the address box, type 169.254.0.10 and then press Enter.
-
Click Configuration… and then Ethernet & IP in the menu on the left side of the page.
-
Enter the IP address, subnet mask, and gateway address assigned to your ESENET, then click Save.
-
Restore your computer’s original settings.
Web browser based management
The ESENET incorporates an embedded web server. This allows you to connect to the device and monitor and configure it using a web browser. Most browsers should work, provided they support JavaScript. We recommend Internet Explorer 6.0 or higher.
Connecting to the ESENET
Once you made sure that your PC is configured to be on the same subnet as the ESENET, start your web browser. In the address box, type the IP address of your device (169.254.0.10 is the default), and then press Enter. (See [EthernetConfig])
The web browser will establish communication with the embedded web server and an overview page similar to the following picture will appear:
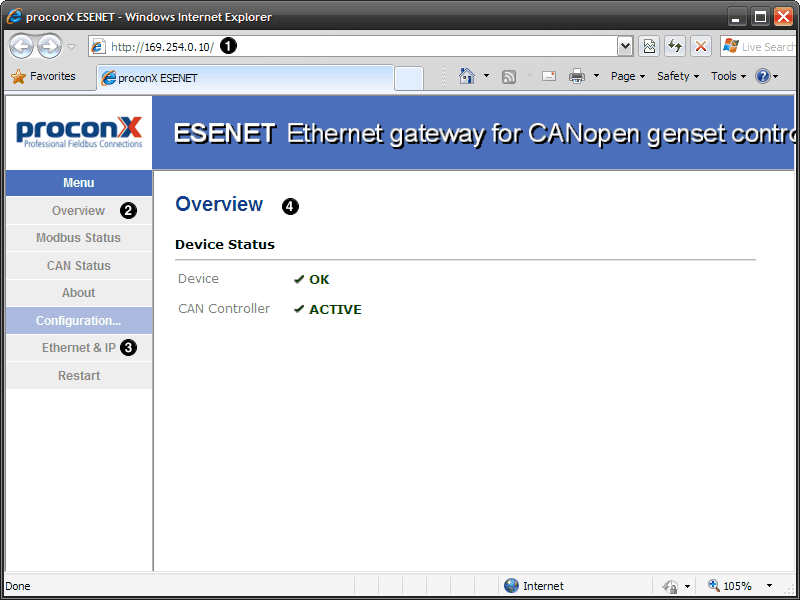
Use the menu bar shown on the left side to navigate the different pages.
|
|
In order to connect to the ESENET via TCP/IP, your PC must be on same IP subnet as the gateway. In most situations this means that the first three numbers of the IP address have to be identical. |
Monitoring and diagnostic
The ESENET offers several web pages which allow monitoring of the status of the different communication networks and the device performance.
Device status
The Overview page shows the principal device status as shown in the following picture:
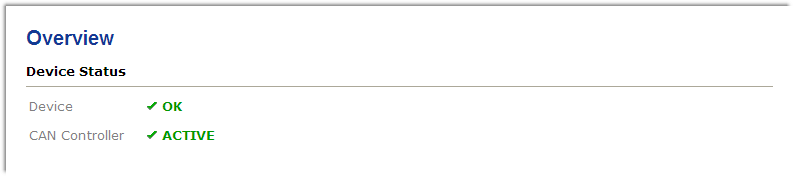
The value shown in the Device row represents the device status register which keeps track of run-time faults. All run-time faults are latched and must be reset by the user. The following faults can be listed here:
- OK
-
The device is fault free.
- Watchdog reset
-
This warning indicates that the device was reset by it’s internal watchdog supervision circuit.
- Brown out reset
-
This warning indicates that the device was reset by it’s internal supply voltage monitoring circuit. This fault occurs when the supply voltage drops below the lower limit.
- Device out of memory
-
This warning indicates that the internal dynamic memory has been exhausted and due to this a certain function could not be completed.
- Device configuration data write failure
-
This alarm indicates that the configuration data could not be written to the non-volatile memory. Configuration data changes will be lost once the device is power-cycled or reset.
- Reset to factory defaults
-
This alarm indicates that the device' configuration data was reset to factory defaults. The device requires re-commissioning.
The CAN controller status indicates the status of the CAN interface and can be in one of the following states:
- ACTIVE
-
The CAN bus is fault free.
- PASSIVE
-
CAN’s built in fault confinement mechanism has set the node to error passive state due to a large number of errors on the CAN bus. This warning indicates a wiring error.
- BUS-OFF
-
CAN’s built in fault confinement mechanism has set the node to bus-off state due to excessive errors on the CAN bus. This alarm indicates a wiring error. The ESENET will not transmit or receive any message on the CAN bus once entered this state. The device needs to be manually restarted on order to recover from this fault.
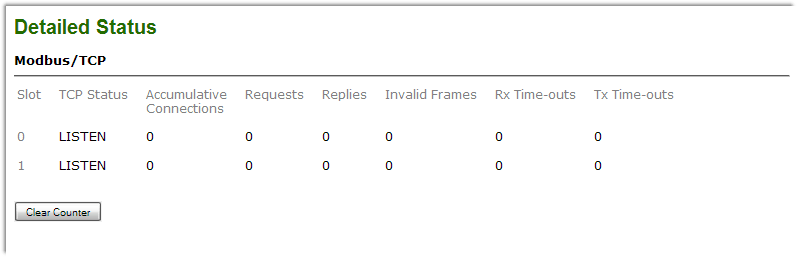
Modbus connection status
The Modbus Status page shows status and statistics about the Modbus/TCP traffic. These values provide valuable information used to troubleshoot Modbus network problems. This page is automatically updated every 5 seconds.
|
|
This page shows accumulated readings since the ESENET was last activated or reset. If power to the ESENET is lost, all cumulative values are reset to zero. |
The following statistics are maintained:
- TCP status
-
Status of the TCP/IP connection as per TCP finite state machine (refer to RFC 793). If no client is connected the status indicates LISTEN. If a client is connected, it’s IP address is shown.
- Accumulative connections
-
A counter that increments each time a client opens a Modbus/TCP connection.
- Requests
-
A counter that increments each time an inbound request message is successfully received.
- Replies
-
A counter that is incremented each time a reply message is sent back to the master. This includes exception replies.
- Rx time-outs
-
A counter that increments if the master connection has timed out. Subsequently the connection is terminated by the ESENET. A time-out occurs if no Modbus request is received from a connected client within a 10 second period.
- Tx time-outs
-
Number time-outs occurred when attempting to send a reply message.
The cumulative diagnostic data is reset when the device is power cycled or reset. The data is also reset by pressing the Clear Counter button.
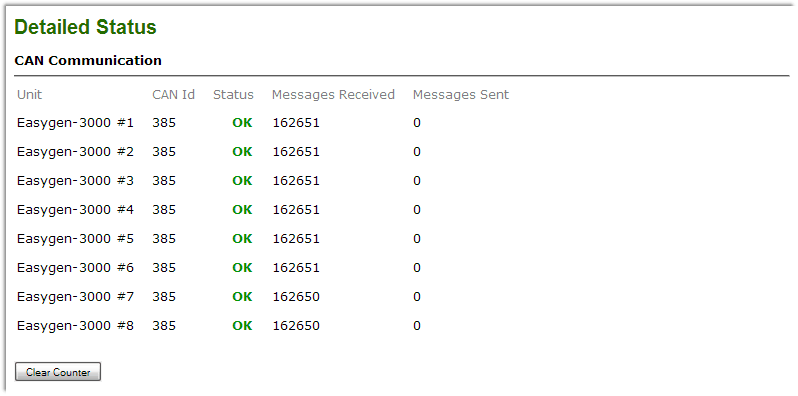
CAN communication status
The CAN Status page shows status and statistics about the CAN bus traffic. These values provide valuable information used to troubleshoot CAN problems. This page is automatically updated every 5 seconds.
|
|
This page shows accumulated readings since the ESENET was last activated or reset. If power to the ESENET is lost, all cumulative values are reset to zero. |
The CAN communication channel between a Woodward CANopen based control and the ESENET can be in one of the following states:
- OK
-
The CAN communication channel with the Woodward CANopen based control has been established. The Woodward device is cyclically sending visualisation data via its TXPDO.
- WAIT
-
The presence of a supported Woodward CANopen based control has been detected however the ESENET is currently waiting to receive a complete visualisation data set.
- TIME-OUT
-
No CANopen PDO was received for a period of 1 second. A Woodward control must be configured to transmit cyclically visualisation data using a TXPDO with a specific COB-ID number and the correct Data Protocol.
The following statistics are maintained:
- Messages received
-
A counter that increments each time an inbound CANopen PDO matching the shown COB-ID is successfully received.
- Messages sent
-
A counter that is incremented each time a SDO message is sent.
The cumulative diagnostic data is reset when the device is power cycled or reset. The data is also reset by pressing the Clear Counter button.
Finding the firmware version and serial number
Click on the About menu entry on the menu bar to show the product information as shown below:
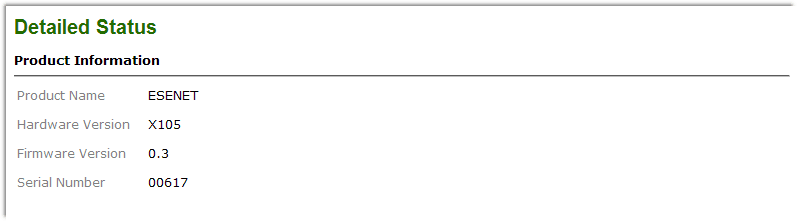
This product information is important for service and support inquiries. The following product information is provided:
- Product name
-
The name of the product.
- Hardware version
-
ESENET hardware version.
- Firmware version
-
The firmware version that is installed on the ESENET.
- Serial number
-
The serial number of the ESENET. The serial number is specific to your device.
Configuring and commissioning
The configuration pages are accessed by clicking on the Configuration… menu entry on the menu bar which then expands a configuration sub-menu. All configuration settings are kept in the device' non-volatile memory.
|
|
If you make changes to any settings, remember to save each page before changing to a different page! |
Configuring Ethernet and IP
Select the Configuration→Ethernet & IP sub-menu from the menu bar to open the Ethernet and IP settings which are shown below:
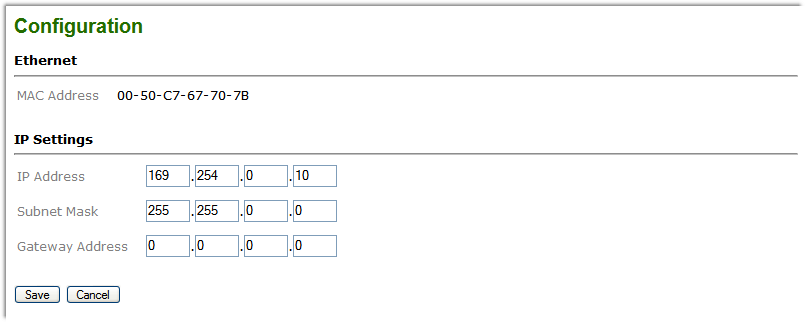
The following Ethernet parameters are shown:
- MAC address
-
The device' unique MAC address. This number is hard coded and cannot be changed.
The following Internet protocol (IP) settings can be entered:
- IP address
-
The IP address assigned to this device.
- Subnet mask (also known as indexterm2:[network mask])
-
If you have a router, enter the subnet mask for the segment to which this device is attached.
- Gateway address
-
If your network segment has a router, enter its IP address here. Otherwise leave the address as 0.0.0.0.
Once you click Save the new settings are stored and applied instantly. The new settings are confirmed with the following page:

|
|
Please write down the new IP address so you are able to communicate with the device in the future! |
Configuring CAN and CANopen
The ESENET gateway itself does not require any CANopen configuration. No Node-ID is allocated for the ESENET because it operates as a CANopen consumer and client only.
However the CANopen settings of the connected Woodward controls must be configured accordingly. (Refer to [WoodwardConfig])
Remote restarting the device
You can perform a remote restart of the device from the web interface. A remote restart is similar to power cycling the device. Possibly connected clients are disconnected and communication is interrupted until the device has rebooted.
To perform a remote restart, click on the Configuration sub-menu and then click on the Restart menu entry. This will open the device restart page as shown below:

Click on the Restart button to perform a restart of the device. The restart is confirmed with the following notification:

Please allow a few seconds before continuing working with the device as it has to fully start-up first, before being able to respond to further web browser requests.
|
|
After a remote restart a Watchdog reset alarm is shown on the device' home page. This is a side-effect of the remote restart procedure and the alarm shall be ignored and cleared. |
Running Toolkit via the ESENET gateway
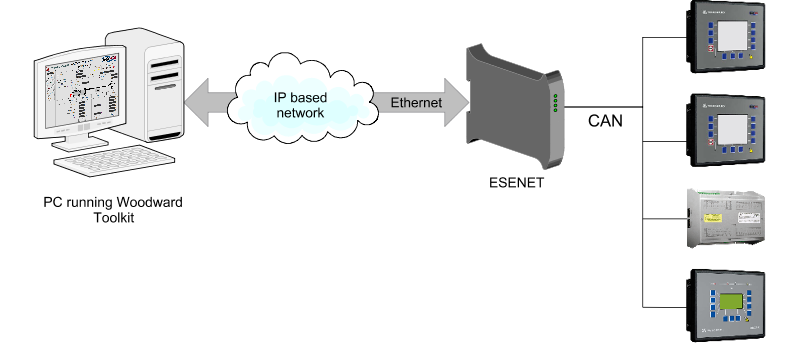
Since firmware version 2.0, the ESENET offers a TCP/CANopen-SDO bridge which is linked to a virtual CAN port on the Toolkit PC.
Using this facility you can run local and remote Toolkit sessions from your PC via Ethernet and TCP/IP through the ESENET gateway to Woodward controls connected on ESENET's CAN interface. The ESENET Toolkit interface can be used in parallel with Modbus/TCP connections.
-
ESENET gateway with firmware 2.0 or above (existing ESENET devices can be upgraded)
-
proconX CAN Library for Toolkit (available from proconX website)
-
PC with installed Woodward Toolkit
How it works
For Toolkit to recognise the ESENET gateway as a CAN interface, a virtual CAN port needs to be installed on the Toolkit PC. proconX provides a CAN Library for Toolkit installer which replaces Tookit’s standard Kvaser USB CAN driver with a custom CAN library. This replacement library will emulate a Kvaser USB CAN port using TCP/IP and ESENET's TCP/CANopen-SDO bridge.
Installation
-
To install, run the self-extracting Installer executable and click Next to continue:
-
Click Next to confirm the installation:
-
The installation is completed, click Finish to exit the installer:
You can revert back to Toolkit’s original Kvaser CAN library by simply uninstalling the proconX CAN Library for Toolkit.
Running Toolkit
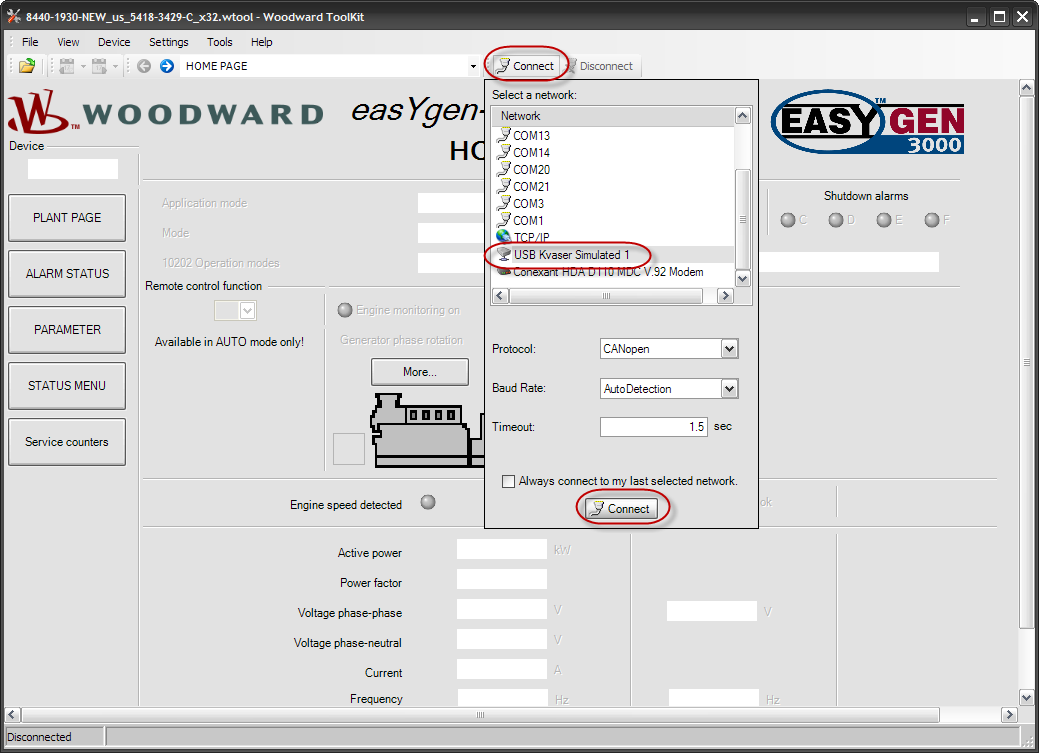
Launch Toolkit in the usual manner and click on the Connect button to open the Select a network drop-down box. In the Network selection list, choose USB Kvaser Simulated 1 as CAN interface and confirm with Connect.
|
|
The USB Kvaser Simulated 1 selection will not show if the proconX CAN Library for Toolkit is not installed! |
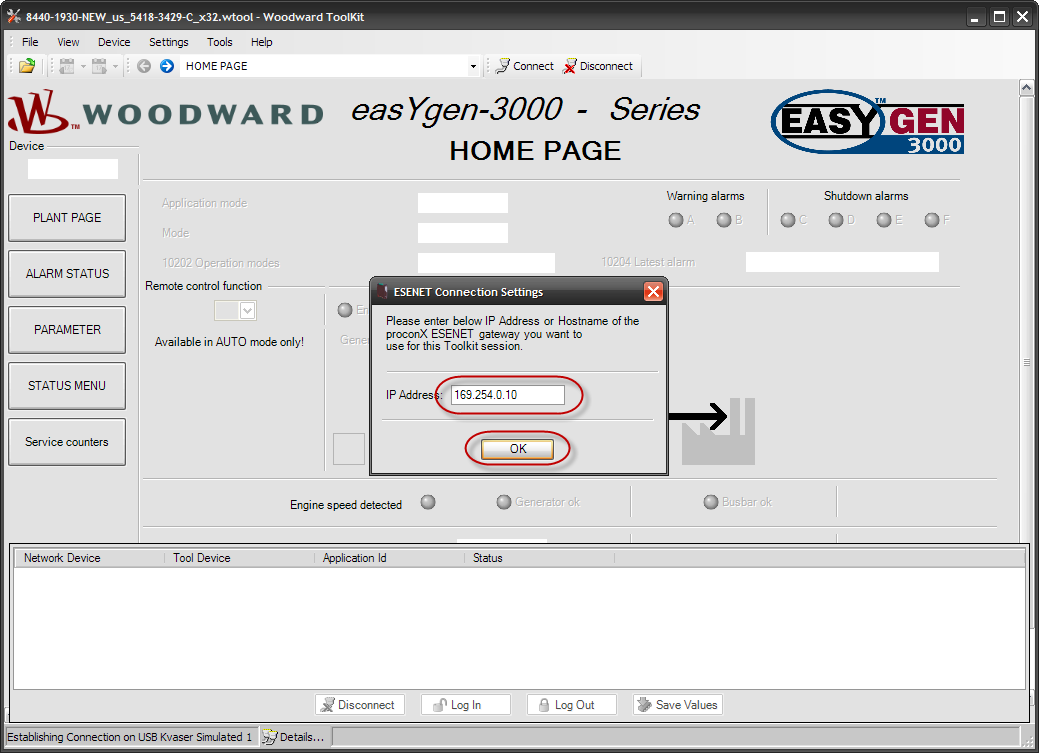
A dialog box will open and ask for the IP address of the connected ESENET gateway. Enter the correct IP address for the ESENET gateway and click OK.
On successful connection, the status in Toolkit’s status line will change from Establishing Connection on USB Kvaser Simulated 1 to Connected on USB Kvaser Simulated 1 as shown below:
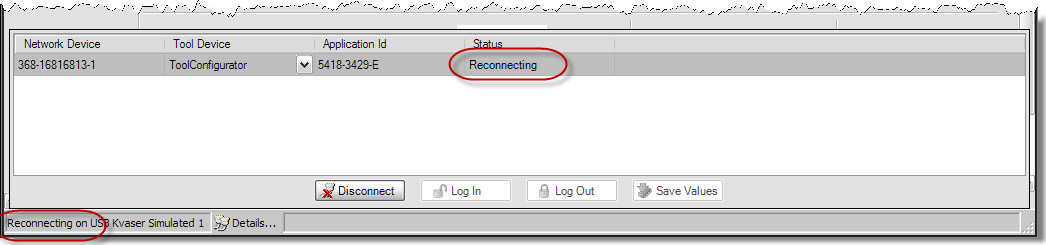
In case of a connection error or a communication error, the Toolkit status will revert back to either Establishing Connection or Reconnecting. In this case terminate the session and establish a new session by clicking Disconnect and Connect again.
TCP Ports
The TCP/CANopen-SDO bridge uses the same TCP port as Modbus/TCP which is port 502. Using the same port as Modbus/TCP simplifies router configuration for VPN applications.
Configuration of connected Woodward controls
The ESENET has been designed to keep the configuration effort required to connect the gateway with Woodward CANopen devices to a minimum. In most situations no additional configuration is necessary to get the ESENET communicating with an Easygen-3000 series control. For a LS-5 control the Node-ID has to be changed from the default value of 33 to be in the range of 1-16. Other Woodward controls like the DTSC-200 may require some configuration changes for settings like CAN baudrate and the TXPDO COB-IDs.
The following list of Woodward CAN device parameters affect the operation of the ESENET gateway and their setting should be checked during installation and commissioning:
-
CAN baudrate
-
CANopen Node-ID
-
COB-ID of Transmit PDOs (TXPDO)
-
Data Protocol of the Transmit PDOs (TXPDO)
For all CAN devices the CAN baudrate must be set to 250 kBit/s.
To minimise the configuration effort, there is a fixed relationship between the CANopen Node-ID, the Modbus Slave ID and the TXPDO COB-ID which is documented in the table below. The relationship follows the rules of the CANopen Predefined Connection Set PDO assignments. Easygen-3000 and LS-5 controls use the COB-ID range from 385 to 400 and the DTSC-200 devices from 1153 to 1168.
| Modbus Slave ID | CANopen Node-ID | Easygen-3000/LS-5 TXPDO COB-ID dec (hex) | DTSC-200 TXPDO COB-ID dec (hex) |
|---|---|---|---|
1 |
1 |
385 (0x181) |
1153 (0x481) |
2 |
2 |
386 (0x182) |
1154 (0x482) |
3 |
3 |
387 (0x183) |
1155 (0x483) |
4 |
4 |
388 (0x184) |
1156 (0x484) |
5 |
5 |
389 (0x185) |
1157 (0x485) |
6 |
6 |
390 (0x186) |
1158 (0x486) |
7 |
7 |
391 (0x187) |
1159 (0x487) |
8 |
8 |
392 (0x188) |
1160 (0x488) |
9 |
9 |
393 (0x189) |
1161 (0x489) |
10 |
10 |
394 (0x18A) |
1162 (0x48A) |
11 |
11 |
395 (0x18B) |
1163 (0x48B) |
12 |
12 |
396 (0x18C) |
1164 (0x48C) |
13 |
13 |
397 (0x18D) |
1165 (0x48D) |
14 |
14 |
398 (0x18E) |
1166 (0x48E) |
15 |
15 |
399 (0x18F) |
1167 (0x48F) |
16 |
16 |
400 (0x190) |
1168 (0x490) |
The Data Protocol of the Transmit PDOs must be set according to the Woodward CANopen device used. The following tables shows the supported Data Protocols.
| Woodward CAN device | Data protocol | Mapped Object ID | TXPDO COB-ID range dec (hex) |
|---|---|---|---|
Easygen-3000 series |
5003 |
n/a |
385 (0x181) - 400 (0x190) |
LS-5 |
5103 |
n/a |
385 (0x181) - 400 (0x190) |
Easygen-1000 series |
4000 or 4003 |
n/a |
385 (0x181) - 400 (0x190) |
Easygen-2000 series |
5100 or 5101 |
n/a |
385 (0x181) - 400 (0x190) |
DTSC-200 |
4700 or 4701 |
03190 |
1153 (0x481) - 1168 (0x490) |
Specific information for Easygen-3000 series controls
The most convenient way to configure the Easygen is using Woodward’s Toolkit software. Below are Toolkit screenshots of the relevant menus.
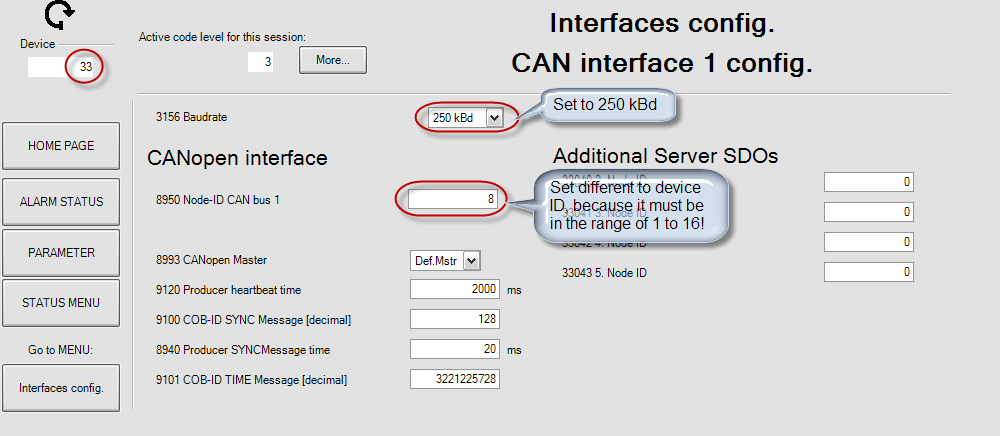
CAN interface
From Woodward’s Toolkit software select the Configure CAN interface 1 page as shown below:
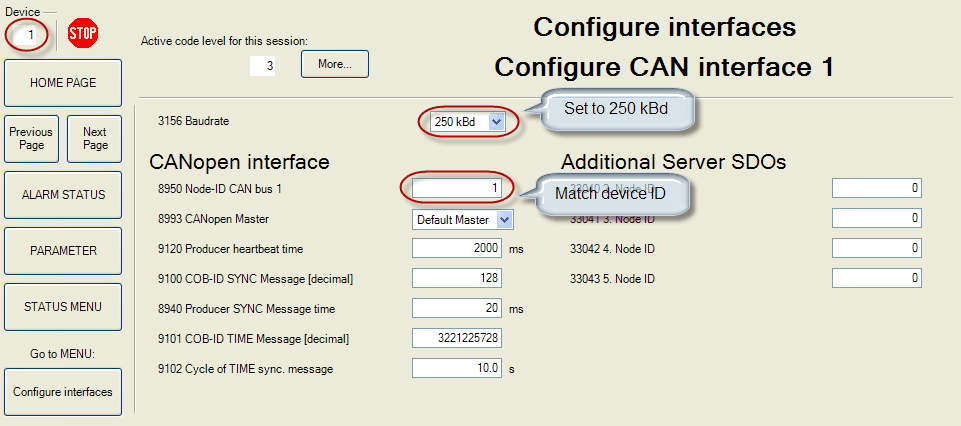
-
Parameter 3156 Baudrate must be set to 250 kBd.
-
Parameter 8950 Node-ID should match the device ID. It must be in the range of 1 to 16 and a unique number in the network. This value also determines the Modbus Slave ID under which the Easygen data can be retrieved.
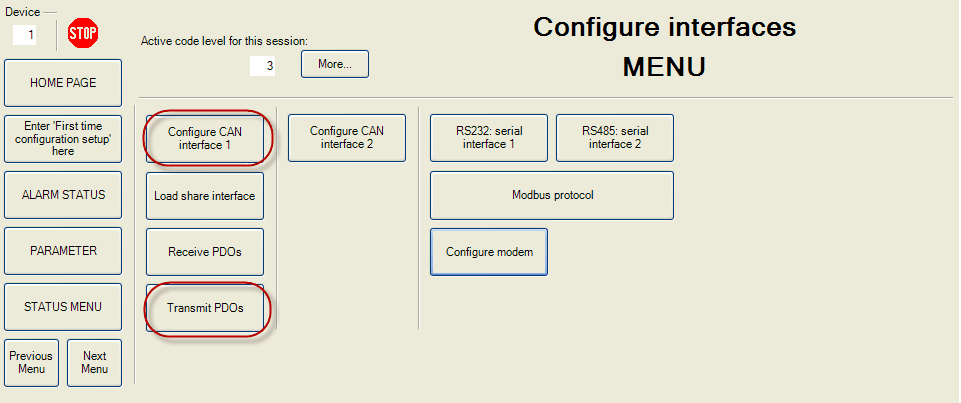
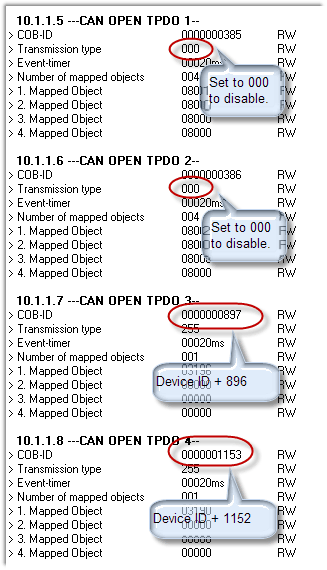
Transmit PDOs
In order for the ESENET gateway to receive cyclic data updates from the Easygen, one of the five available Transmit PDOs (TXPDO) must be configured. Typically Tranmsit PDO 1 is already pre-configured for that purpose, but any of the five TXPDOs could be used for that purpose.
If for example Transmit PDO 1 is used, then:
-
parameter 9600 COB-ID must be set to 384 + Node-ID,
-
parameter 8962 Selected Data Protocol to 5003 and
-
parameter 9602 Tramsission type to 255.
In the following example for an Easygen with device ID of 1 and Node-ID of 1, the Transmit PDO 1 is used to send data updates every 20 ms:
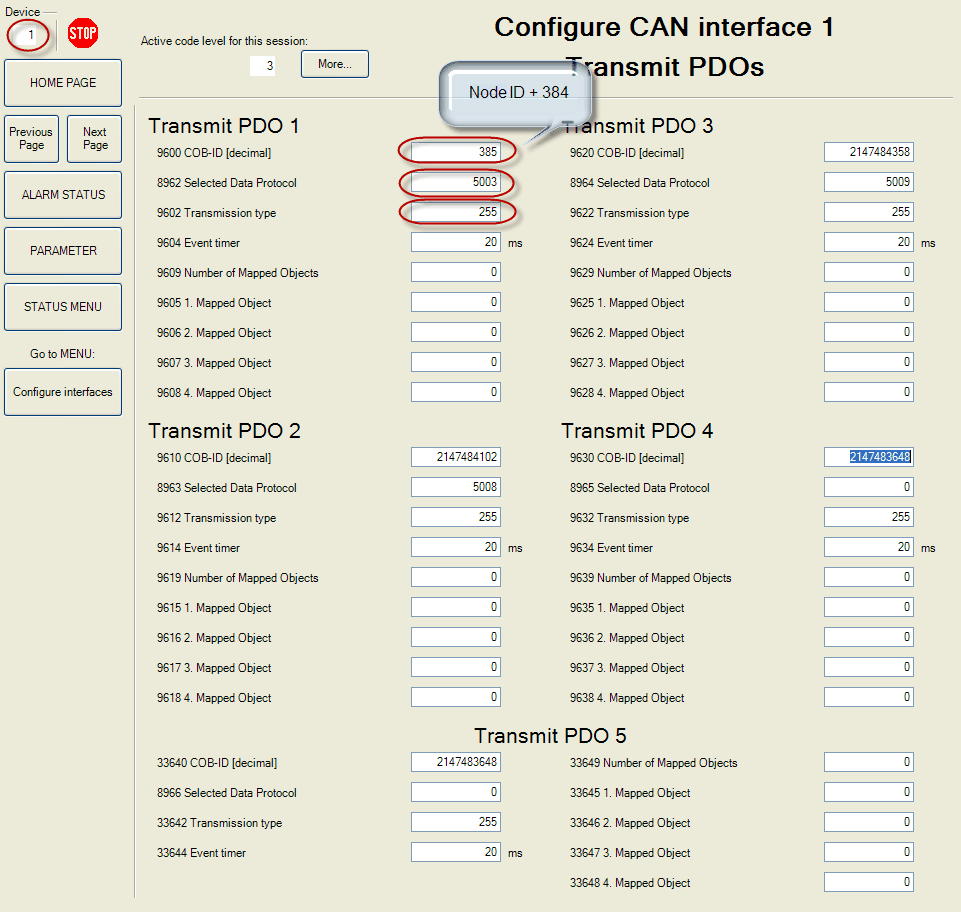
|
|
All COB-IDs used in the CAN network must be unique. Please make sure that a COB-ID is only configured once. If TXPDO or RXPDO COB-ID entries are referring to an already used COB-ID, either disable that PDO or change the COB-ID. |
Specific information for LS-5 controls
The LS-5 CANopen parameters are configured using Woodward’s Toolkit software. Below are Toolkit screenshots of the relevant menus.
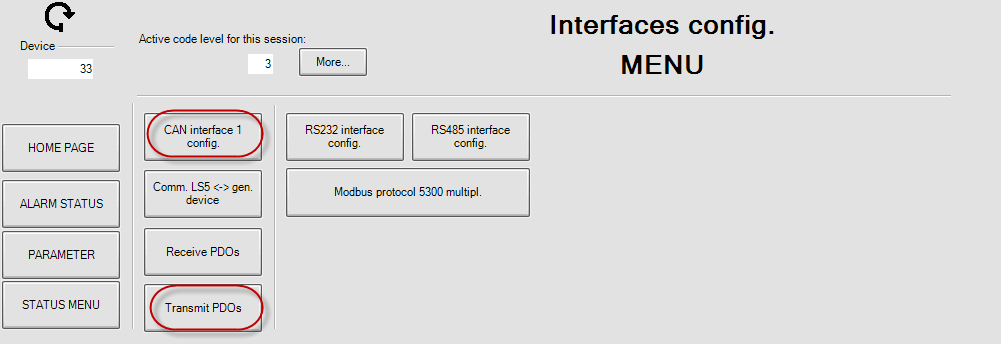
CAN interface
From Woodward’s Toolkit software select the CAN interface 1 config page as shown below:
-
Parameter 3156 Baudrate must be set to 250 kBd.
-
Parameter 8950 Node-ID must be changed to be in the range of 1 to 16 and a unique number in the network. This value also determines the Modbus Slave ID under which the LS-5 data can be retrieved. One could for example use Node-IDs 1 to 8 for Easygens and Node-IDs 8 to 16 for LS-5s.
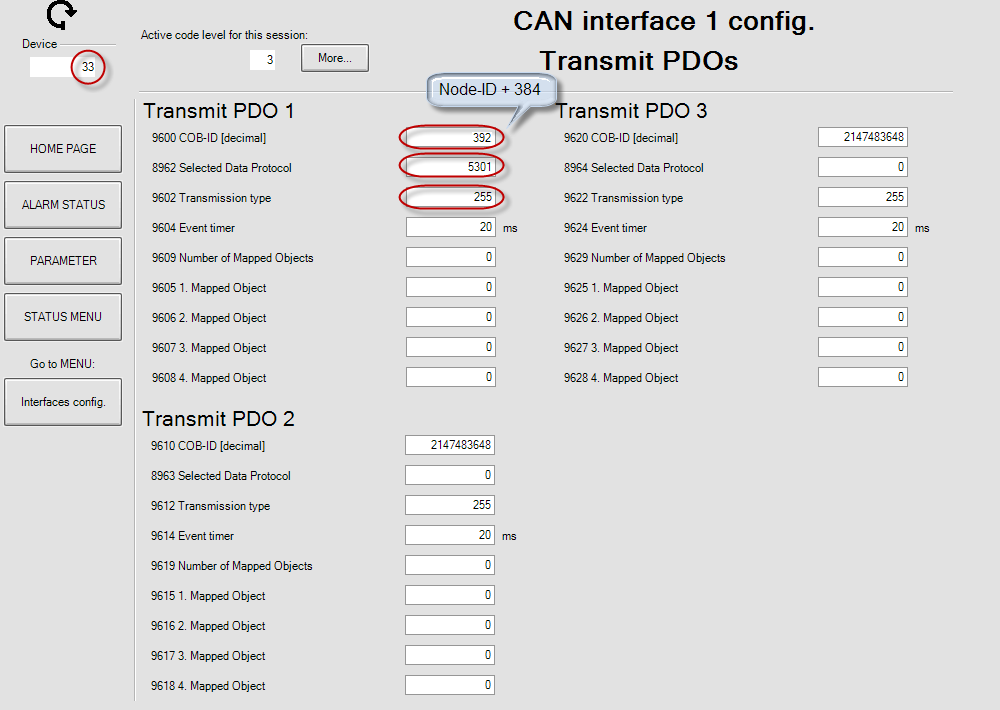
Transmit PDOs
In order for the ESENET gateway to receive cyclic data updates from the LS-5, one of the five available Transmit PDOs (TXPDO) must be configured. Typically Tranmsit PDO 1 is already pre-configured for that purpose, but any of the five TXPDOs could be used for that purpose.
If for example Transmit PDO 1 is used, then:
-
parameter 9600 COB-ID must be set to 384 + Node-ID,
-
parameter 8962 Selected Data Protocol to 5301 and
-
parameter 9602 Tramsission type to 255.
In the following example for an LS-5 with device ID of 33 but Node-ID of 8, the Transmit PDO 1 is used to send data updates every 20 ms:
|
|
All COB-IDs used in the CAN network must be unique. Please make sure that a COB-ID is only configured once. If TXPDO or RXPDO COB-ID entries are referring to an already used COB-ID, either disable that PDO or change the COB-ID. |
Specific information for DTSC-200 controls
The DTSC-200 CANopen parameters are configured using Woodward’s LeoPC software. Below are LeoPC screenshots of the relevant parameters.
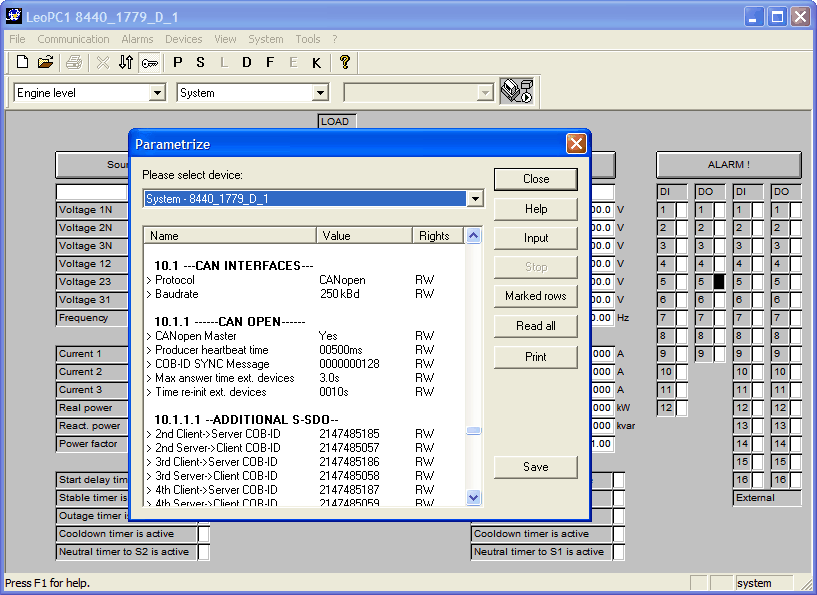
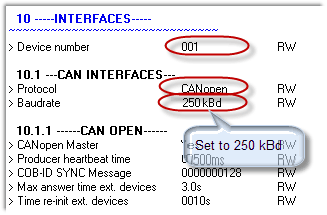
CAN interfaces
-
Parameter Device number determines the Modbus Slave ID under which the DTSC-200 data can be retrieved. It must be set to a unique number in the network.
-
Parameter Protocol must be set to CANopen and
-
parameter Baudrate to 250 kBd.
Transmit PDOs
In order for the ESENET gateway to receive cyclic data updates from the Easygen, one of the four available Transmit PDOs (TXPDO) must be configured. Typically Tranmsit PDO 4 is already pre-configured for that purpose, but any of the four TXPDOs could be used for that purpose. Other TXPDOs which transmit on COB-IDs reserved for the Easygen (for example 385 and 386) must be disabled or changed to a different COPB-ID range.
If for example Transmit PDO 4 is used, then the following changes are required:
-
TPDO 1 (COB-ID 385) disabled or changed to a different range,
-
TPDO 2 (COB-ID 386) disabled or changed to a different range,
-
TPDO 3 can stay configured if set to to COB-ID 1152 + Node-ID,
-
TPDO 4 parameter COB-ID set to 1152 + Node-ID,
-
TPDO 4 parameter Transmission type set to 255,
-
TPDO 4 parameter 1. Mapped Object set to 03190 in order to select Data Protocol 4700 and the other mapped objects to 00000.
In the following example for a DTSC-200 with device ID of 1, the Transmit PDO 4 is used to send data updates every 20 ms. TXPDO 1 and 2 are disabled because the use COB-IDs reserved for the Easygen.
|
|
All COB-IDs used in the CAN network must be unique. Please make sure that a COB-ID is only configured once. If TXPDO or RXPDO COB-ID entries are referring to an already used COB-ID, either disable that PDO or change the COB-ID. |
Modbus data reference
This chapter describes how process data and configuration data of the Woodward controls are organized in logical blocks and accessed via Modbus.
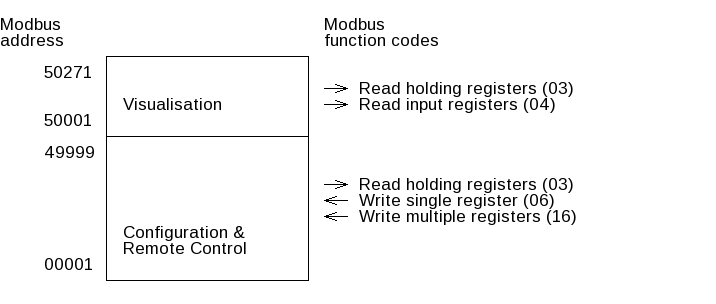
The ESENET supports two principal Modbus data tables one for visualisation and one for configuration & remote control. These data tables are organised in a similar manner to the serial Modbus adress ranges of the Woodward controls. This allows an easy transition from serial Modbus to Modbus/TCP.
The Visualisation Data Table is located at start address 50001 and the Configuration & Control data table is located at start address 1 up to address 49999.
Modbus Slave IDs
The Modbus Slave ID (also known as Unit Identifier or Slave Address) is used to address individual Woodward controls. There is a fixed relationship between the CANopen Node-ID and the Modbus Slave ID which is documented in the table below.
| Modbus Slave ID | CANopen Node-ID |
|---|---|
1 |
1 |
2 |
2 |
3 |
3 |
4 |
4 |
5 |
5 |
6 |
6 |
7 |
7 |
8 |
8 |
9 |
9 |
10 |
10 |
11 |
11 |
12 |
12 |
13 |
13 |
14 |
14 |
15 |
15 |
16 |
16 |
Visualisation Data Table
The Visualisation Data Table provides a very fast and efficient means to read important process data. Because the visualisation data is buffered in the ESENET gateway, the data is replied instantly without blocking the PLC’s Modbus/TCP master communication channel.
The Visualisation Data Table is a dedicated buffer area in the ESENET gateway which is filled in the background by the Woodward control through cyclically transmitted PDOs. Therefore the structure and layout of the Visualisation Data Table depends on the Woodward control used and the configured Data Protocol. The ESENET does not perform any modification to the representation of the data values.
The Visualisation Data Table is located in the so called Input register block, which sometimes is also identified with offset 3:00000. The block is accessed using Modbus function code 04 Read input registers.
Registers in this data table can only be accessed if the CAN communication between ESENET and the Woodward control has been established. If this is not the case, Modbus exception code 0B Gateway target device failed to respond is returned, indicating the Woodward control is not present on the CAN bus.
Please consult the appropriate Woodward manual for exact layout, encoding and representation of the data in the Visualisation Data Table. Some examples for the most commonly used Woodward controls are shown in the following tables:
Easygen-3000
| Address block | Register address | Easygen-3000 interface manual designator |
|---|---|---|
3 |
50001 |
Protocol-ID, always 5003 |
3 |
50002 |
Pickup speed |
… |
… |
… |
3 |
50268 |
Exhaust Gas Temp |
|
|
If no response was obtained from the addressed Woodward control, Modbus exception code 0B Gateway target device failed to respond is returned. |
LS-5
| Address block | Register address | LS-5 interface manual designator |
|---|---|---|
3 |
50001 |
Protocol-ID, always 5103 |
3 |
50002 |
System A total reactive power |
… |
… |
… |
3 |
50090 |
Digital information |
|
|
If no response was obtained from the addressed Woodward control, Modbus exception code 0B Gateway target device failed to respond is returned. |
DTSC-200
| Address block | Register address | DTSC-200 interface manual designator |
|---|---|---|
3 |
50001 |
Protocol-ID, 4700 or 4701 |
3 |
50002 |
Source 2: Voltage 12 |
… |
… |
… |
3 |
50088 |
Timer state feedback signals |
… |
… |
… |
3 |
50104 |
Source 1: Positive re-active energy counter |
Easygen-1000
The following table describes the layout of the Modbus data tables when interfacing to the Easygen-1000 using Data Protocol Parameter No. 3190/Object 2C76h.
| Address block | Register address | Mux | Word size | Parameter # | Easygen-1000 interface manual designator |
|---|---|---|---|---|---|
3 |
50001 |
0 |
16 bit |
n/a |
Protocol-ID, 4003 |
3 |
50002 |
0 |
32 bit |
108 |
Generator: Voltage V L12 |
3 |
50004 |
1 |
16 bit |
144 |
Generator: Frequency |
3 |
50005 |
1 |
32 bit |
114 |
Generator: Voltage V L1N |
3 |
50007 |
2 |
16 bit |
147 |
Mains: Frequency f 123 |
3 |
50008 |
2 |
32 bit |
109 |
Generator: Voltage V L23 |
3 |
50010 |
3 |
16 bit |
160 |
Generator: Power factor cosf L1 |
3 |
50011 |
3 |
32 bit |
115 |
Generator: Voltage V L2N |
3 |
50013 |
4 |
16 bit |
141 |
Mains: Power factor cosf L1 |
3 |
50014 |
4 |
32 bit |
110 |
Generator: Voltage V L31 |
3 |
50016 |
5 |
16 bit |
10100 |
Engine speed |
3 |
50017 |
5 |
32 bit |
116 |
Generator: Voltage V L3N |
3 |
50019 |
6 |
16 bit |
10110 |
Battery voltage |
3 |
50020 |
6 |
32 bit |
118 |
Mains: Voltage V L12 |
3 |
50022 |
7 |
16 bit |
10111 |
Analog input [T1] |
3 |
50023 |
7 |
32 bit |
121 |
Mains: Voltage V L1N |
3 |
50025 |
8 |
16 bit |
10112 |
Analog input [T2] |
3 |
50026 |
8 |
32 bit |
119 |
Mains: Voltage V L23 |
3 |
50028 |
9 |
16 bit |
10106 |
Discrete inputs, status |
3 |
50029 |
9 |
32 bit |
122 |
Mains: Voltage V L2N |
3 |
50031 |
10 |
16 bit |
10107 |
Relay outputs, status |
3 |
50032 |
10 |
32 bit |
120 |
Mains: Voltage V L31 |
3 |
50034 |
11 |
16 bit |
10201 |
System status |
3 |
50035 |
11 |
32 bit |
123 |
Mains: Voltage V L3N |
3 |
50037 |
12 |
16 bit |
10131 |
Alarm classes |
3 |
50038 |
12 |
32 bit |
111 |
Generator: Current I L1 |
3 |
50040 |
13 |
16 bit |
10139 |
Discrete inputs with alarm class |
3 |
50041 |
13 |
32 bit |
112 |
Generator: Current I L2 |
3 |
50043 |
14 |
16 bit |
10133 |
Alarms 1 |
3 |
50044 |
14 |
32 bit |
113 |
Generator: Current I L3 |
3 |
50046 |
15 |
16 bit |
10134 |
Generator, watchdog 1 |
3 |
50047 |
15 |
32 bit |
134 |
Mains: Current I L1 |
3 |
50049 |
16 |
16 bit |
10135 |
Mains, watchdog 1 |
3 |
50050 |
16 |
32 bit |
136 |
Generator: Reactive power Q |
3 |
50052 |
17 |
16 bit |
10137 |
Analog inputs, wire break |
3 |
50053 |
17 |
32 bit |
135 |
Generator: Real power P |
3 |
50055 |
18 |
16 bit |
10141 |
Analog inputs |
3 |
50000 |
18 |
32 bit |
140 |
Mains: Real power P L1 |
3 |
50058 |
19 |
16 bit |
10200 |
System status |
3 |
50059 |
19 |
32 bit |
150 |
Mains: Reactive power Q |
3 |
50061 |
20 |
16 bit |
10306 |
Generator: power factor cosphi |
3 |
50062 |
20 |
16 bit |
10301 |
Mains: power factor cosphi |
3 |
50063 |
20 |
16 bit |
10305 |
Mains: reactive power Q |
3 |
50064 |
21 |
16 bit |
10302 |
Generator: real power P |
3 |
50065 |
21 |
16 bit |
10303 |
Generator: reactive power Q |
3 |
50066 |
21 |
16 bit |
10304 |
Mains: real power P |
3 |
50067 |
22 |
16 bit |
10138 |
Generator, watchdog 2 |
3 |
50068 |
22 |
32 bit |
2520 |
Real energy |
3 |
50070 |
23 |
16 bit |
10140 |
Flag of the LogicsManager |
3 |
50071 |
23 |
32 bit |
2522 |
Reactive energy |
3 |
50073 |
24 |
16 bit |
10202 |
Parameter 10202 |
3 |
50074 |
24 |
32 bit |
159 |
Generator: Calculated ground current |
3 |
50076 |
25 |
16 bit |
10307 |
External discrete inputs with alarm class |
3 |
50077 |
25 |
32 bit |
10308 |
Parameter 10308 |
3 |
50079 |
26 |
16 bit |
8003 |
External relay outputs, status |
3 |
50080 |
26 |
32 bit |
8013 |
External discrete inputs, status |
For details about physical units and encoding of the value, please refer to chapter "CANopen: Mapping-Parameter" in the "easYgen-1000 Series - Interface" manual.
Modbus function codes
The ESENET supports the Modbus function codes 03, 04, 06 and 16. A maximum of 125 16-bit words can be requested with Modbus command 04.
| Modbus function code | Function name | Access | Max. number of 16-bit words per transaction | Address block |
|---|---|---|---|---|
04 |
Read input registers |
read |
125 |
3:00000 |
03 |
Read holding registers |
write |
125 |
4:00000 |
06 |
Write single register |
write |
1 |
4:00000 |
16 |
Write multiple registers |
write |
2 |
4:00000 |
Modbus exception codes
The following table lists the Modbus exception responses sent by the ESENET gateway instead of a normal response message in case of an error:
| Modbus exception code | Exception name | Reason |
|---|---|---|
01 |
Illegal function |
A Modbus master sent a Modbus function which is not supported by the gateway. Please refer to the documentation of the individual data tables for valid function codes. |
02 |
Illegal data address |
A Modbus master queried a non-existing Modbus address or the queried range points outside of a data table. Please refer to the documentation of the individual data tables for valid address ranges. |
03 |
Illegal value |
A Modbus master sent a Modbus message which’s structure or implied length is invalid. |
0B |
Gateway target device failed to respond |
A Modbus master tries to access data which is unavailable because no response was obtained from the target Woodward unit. Usually means that the unit is not present on the CAN bus. |
Decommissioning
Before disconnecting the ESENET unit please follow the rules in [Safety].
Disconnecting
|
|
|
Disposal
|
|
This product must be disposed of at a specialized electronic waste recycling facility. Do not dispose of in domestic waste. |
Appendix A: Specifications
|
Product name
|
ESENET |
Interfaces |
|
Ethernet |
1 |
Serial ports |
1 for diagnostics (RS-232) |
CAN |
1 |
User interface |
|
LED indicators |
Power (green), Ethernet link (green), 2 status (bi-color red/green) |
Monitoring & configuration |
Web browser based |
Diagnostic |
|
High availability features |
Watchdog supervision, brown-out detection |
CAN interface |
|
Connector |
male 9-pin D-sub, CiA DS-102 pin-out |
Physical layer |
ISO 11898 |
Isolation |
non-isolated |
Speed |
250 kBit/s |
Max. number of connected nodes |
64 |
Protocols |
CANopen consumer & client |
Number of adressable nodes |
16 |
Diagnostic port |
|
Connector |
male 9-pin D-sub, DTE, EIA-574 pin-out |
Physical layer |
EIA-232-F |
Isolation |
n/a |
Signals |
RXD, TXD, RTS, CTS, DTR, DSR, DCD, RI |
Speed |
9600 bps |
Protocols |
ASCII terminal |
Ethernet port |
|
Connector |
8-pin RJ-45 socket for Cat 5 UTP |
Physical & Data Link Layer Layer |
IEEE 802.3i 10BASE-T |
Isolation |
1.5 kV galvanic |
Speed |
10 Mbit/s |
Max. cable length |
100 m (328 ft) |
Ethernet frame types |
802.3 |
Protocols |
Modbus/TCP slave, HTTP, IP, TCP, ARP |
Concurrent connections |
8 Modbus/TCP, 2 HTTP |
Power supply |
|
Connector |
3.81 mm 2-pin pluggable terminal block header |
Voltage |
10-30 V DC |
Current |
30 mA typical @ 24 V DC |
Intrinsic consumption |
750 mW |
Electromagnetic compatibility |
|
Emissions (radiated and conducted) |
AS/NZS CISPR 22 / EN 55022 (Class A) |
Immunity |
EN 55024 |
Electrostatic discharge |
EN 61000-4-2 |
Radiated RF |
EN 61000-4-3 |
Fast transients |
EN 61000-4-4 |
Conducted RF |
EN 61000-4-6 |
Enclosure |
|
Material |
Self-extinguishing PC/ABS blend (UL 94-V0) |
Mounting |
35 mm DIN rail (EN 60715) |
Classification / Type rating |
IP 20 / NEMA Type 1 |
Cooling |
Convection |
Environmental |
|
Operating temperature |
0 to 60 °C / 32 to 140 °F |
Storage temperature |
-25 to 85 °C / -13 to 185 °F |
Humidity |
10 to 95% non condensing |
Operating ambience |
Free from corrosive gas, minimal dust |
Physical |
|
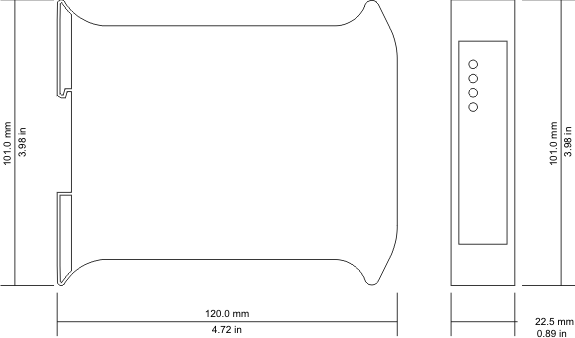
Dimensions |
101 x 22.5 x 120 mm / 3.98 x 0.886 x 4.72 in |
Weight |
0.13 kg / 0.287 lb |
Compliance |
|
Australia |
C-Tick |
Europe |
CE, RoHS |
USA |
FCC Part 15 (Class A) |
Canada |
ICES-003 (Class A) |
Dimensions
Glossary
- 10BASE-T
-
10 Mbit/s twisted pair Ethernet standard. Standardized in IEEE 802.3i
- APIPA
-
Automatic Private IP Addressing
- CAN
-
Controller area network. Standardized in ISO 11898.
- CANopen
-
Internationally standardized (EN 50325-4) CAN-based higher-layer protocol for embedded control systems.
- CiA DS-102
-
Standard for the pinout of CAN connectors
- Class A
-
Class A equipment is that used in commercial or light industrial environments.
- COB-ID
-
Unique CANopen Communication Object Identifier.
- DIN rail
-
35 mm wide mounting bracket standardized in DIN/EN 50022.
- DTE
-
Data terminal equipment. DTE and DCE devices have different pinouts for RS-232 connectors. A PC for example is a DTE.
- EIA-232
-
Standard for serial transmission of data between two devices, also known as RS-232 and V.24.
-
-
- EIA-574
-
Standard for the pinout of serial D-sub connectors.
- EMC
-
Electromagnetic compatibility
- EMI
-
Electromagnetic interference
- ESD
-
Electrostatic discharge. ESD can damage electronic equipment.
- IEEE
-
Institute of Electrical and Electronics Engineers
- IP
-
Ingress Protection Rating standardized in IEC 60529. Standard for various grades of electrical enclosures.
- ISO
-
International Standards Organisation
- MAC address
-
Every piece of Ethernet hardware has a unique number assigned to it called it’s MAC address. MAC addresses are administered and assigned by the IEEE organization.
- Modbus
-
Fieldbus protocol used in the process automation industry. It uses a master and slave structure. Originally developed by Modicon, now part of Schneider Automation.
- NEMA
-
National Electrical Manufacturers Association. NEMA defines standards for various grades of electrical enclosures.
- Node
-
A communications device on the network
- PC/ABS
-
Polycarbonate-ABS. Widely used thermoplastic material.
- PDO
-
CANopen Process Data Object. Process data the device is either producing or consuming.
- PLC
-
Programmable Logic Controller
- Predefined Connection Set
-
The CANopen Predefined Connection Set defines standard COB-IDs for PDOs and SDOs.
- RS-232
-
See EIA-232.
- SDO
-
CANopen Service Data Object.
- TXPDO
-
CANopen Transmit Process Data Object. Process data the device is producing.
- RXPDO
-
CANopen Receive Process Data Object. Process data the device is consuming.
- UL 94
-
Plastics flammability standard released by Underwriters Laboratories of the USA.
Document revision history
|
2011-01-28
|
Initial Release |
|
2011-04-06
|
Editorial Changes. |
|
2013-02-19
|
Added Toolkit interface, LS-5 configuration and Easygen-1000 Modbus table |
No part of this material may be reproduced or transmitted in any form or by any means or used to make any derivative work without express written consent from the copyright holders.
proconX is a trademark of proconX Pty Ltd. Modbus is a registered trademark of Schneider Automation Inc. CANopen is a registered trademark of CAN in Automation e.V. Easygen is a trademark of Woodward, Inc. All other product and brand names mentioned in this document may be trademarks or registered trademarks of their respective owners.
proconX Pty Ltd makes no warranty for the use of its products, other than those expressly contained in the Company’s standard warranty which is detailed in the Terms and Conditions located on the Company’s Website. The Company assumes no responsibility for any errors which may appear in this document, reserves the right to change devices or specifications detailed herein at any time without notice, and does not make any commitment to update the information contained herein. No licenses to patents or other intellectual property of proconX are granted by the Company in connection with the sale of proconX products, expressly or by implication. proconX products are not authorized for use as critical components in life support devices or systems.
We provide an electronic support and feedback system for our proconX products. It can be accessed through the following web link:
Your feedback and comments are always welcome. It helps improving this product.
For further information about the ESENET product or this document please contact us at:
proconX Pty Ltd Unit 7 / 14 Argon St Sumner QLD 4074 Australia Tel +61 7 3376 3911 Fax +61 7 3102 9206 Website: http://www.proconx.com/esenet